Scenario Trees
Consider a general stochastic process $X$ over a discrete time space $T$, i.e., $X = (X_1,\dots,X_T)$ where $X_1$ is a deterministic starting value and the rest are random values or random vectors whose probability distribution is known. A scenario tree is a discrete time and discrete state process approximating the process X. We represent the scenario tree by $\tilde{X} = (\tilde{X}_1,...,\tilde{X}_T)$. A scenario is a path from the root node to any of the leaves in the tree. The number of stages in a scenario must be equal to the number of stages in a scenario tree which is equal to the length of the sample from the stochastic process $X$.
A basic scenario tree can be created using the Tree(bstructure::Array{Int64,1}, dimension::Int64) function in the package. This function takes the branching structure of the tree and the dimension of the states that you are working on. For example, consider a tree with a branching structure of 1x2x2. This is a tree with a root in stage 1, and 2 nodes in stage 2 and each of the 2 nodes in stage two has 2 nodes in stage 3 and each node has only one state and so dimension = 1.
julia> example1 = Tree([1,2,2],1);
julia> treeplot(example1);The above tree basically is not optimal since we just randomly fill the states of the nodes of a tree with random values. This is an example of a scenario tree to begin with in stochastic approximation process. We start with a tree like this and then we use samples from a known distribution to improve the tree for a certain specified number of iterations as we shall see in the tutorials to follow.
The above tree is in 1-state dimension.
The following shows the procedure to plot trees in 2 or higher dimension. We will employ the use of the function part_tree() which partitions the main tree into sub-trees of different states. For example, if the main tree is in 2 dimension, this function will return an array with two trees where the only difference is the states of the nodes of the trees. Then, we can plot each of this trees and display. Alternatively, you can use the function plot_hd which plots the trees in any dimension without partition.
julia> example2 = Tree([1,2,2], 2);
julia> example2Trees = part_tree(example2);
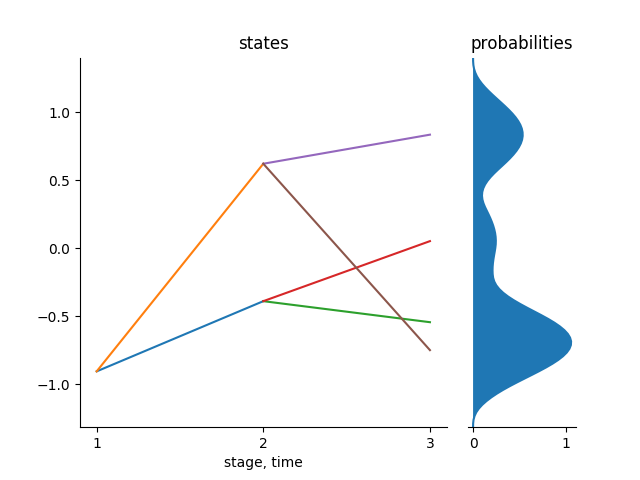
julia> tree_plot(example2Trees[1])
julia> savefig("example21.png")
julia> tree_plot(example2Trees[2])
julia> savefig("example21.png")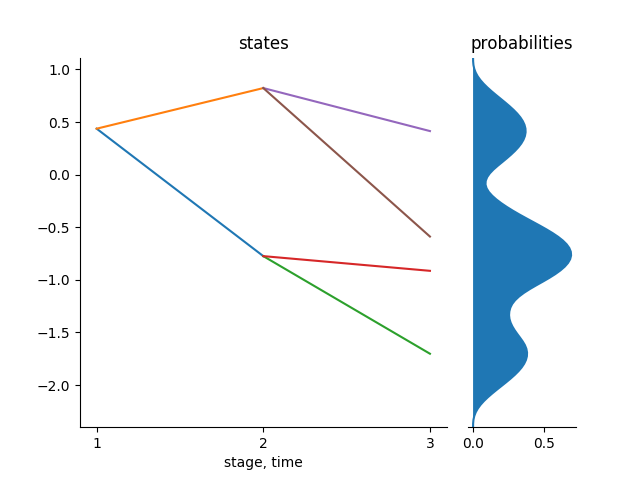 | 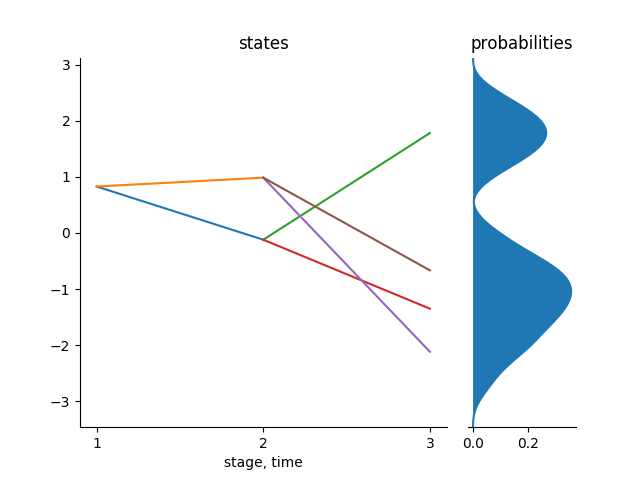 |
|---|---|
| Tree of state 1 | Tree of state 2 |
And in general, we can generate a tree in any d state dimension.
Functions describing a scenario tree
The above tree can described by the following functions: nodes, stages, height, leaves and the root of the tree.
Each tree has stages starting from $1$ where the root node is.
Nodes of the tree
This are the vertices that are in the scenario tree. Each node in the tree has a parent node except the root node where the tree starts from. As stated before, each scenario tree is characterized by its name, parents of the nodes , children of each parent nodes e.t.c. So therefore, we have nodes which has parents and those nodes are the children of the parent nodes.
For example,
julia> nodes(example1)
1:7Stages of the tree
Each node in a tree is in a specific stage and nodes in the same stage have the same number of children. The stages in a tree starts from 0 where the root node is and ends at stage T where the leaf nodes are.
julia> stage(example1)
0
1
1
2
2
2
2The above example shows that we have 1 node in stage 0, 2 nodes in stage 1 and 4 nodes in stage 2. Totally, these scenario tree has 3 stages if you count from 1. The height of this scenario therefore is 3.
Root of the tree
The root of the tree is the node in which the tree starts from. The root of the tree has no parent; more or less, is the parent of all nodes.
julia> root(example1)
1-element Array{Int64,1}
1The function root can also give us a sequence of nodes to reach a particular node of the tree. It turns out that this function will be very important in stochastic approximation as it will give us a path that we can improve with samples from a stochastic process.
If we want a sequence of nodes to reach, for example, node 6 in the above tree, we just call out the root function as follows:
julia> root(example1,6)
3-element Array{Int64,1}
1
3
6Leaves of the tree
In each tree, we have the leaves. Leaves are all those in the tree which doesn't have children nodes. They are the terminal nodes in the tree. Our function leaves returns the leaf nodes in the tree, their indexes and the conditional probabilities to reach each of the leaves from the root node. Consider the following:
julia> leaves(example1)
([4,5,6,7], 1:4, [0.2508,0.1709,0.2566,0.2508])From the above, it is clear that the sum of the conditional probabilities to reach all the leaves in the tree is 1.
Plotting the tree
One of the most important things in programming is visualization. In this package, we can plot a scenario tree in 1D with the tree_plot function and with the plot_hd function for a scenario tree in D dimension.
You need to install the PyPlot.jl package for this plots.
Matplotlib is required at the moment so that you can be able to do the plots. In the future, we are thinking of changing into a lighter back-end for plots.
For example, we can plot a default tree already in the package and then the figure can be saved with the function savefig(). These trees can be accessed through an identifier which is just a number. These identifiers are 0, 301, 302, 303, 304, 305, 306, 307, 401, 402, 4022, 404, 405. Therefore, for these examples, you can just access them through their identifier. For example, Tree(402) returns tree with the identifier 402 in our examples. You can have a look at these trees and plot them just to get a glimpse on how scenario trees are and then you can also have a look at their characteristics as explained in the above example.
julia> tree_plot(Tree(402));
julia> savefig("Tree402.png");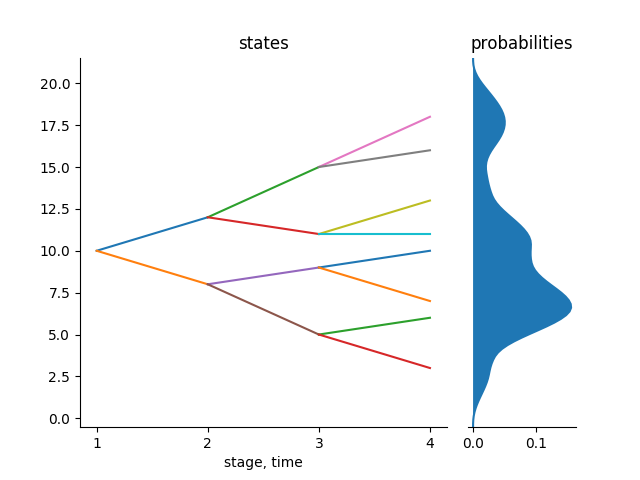
We can plot a tree in 2 dimension as follows:
julia> pt = part_tree(Tree4022));
julia> tree_plot(pt[1])
julia> savefig("Tree40221.png")
julia> tree_plot(pt[2])
julia> savefig("Tree40222.png") | 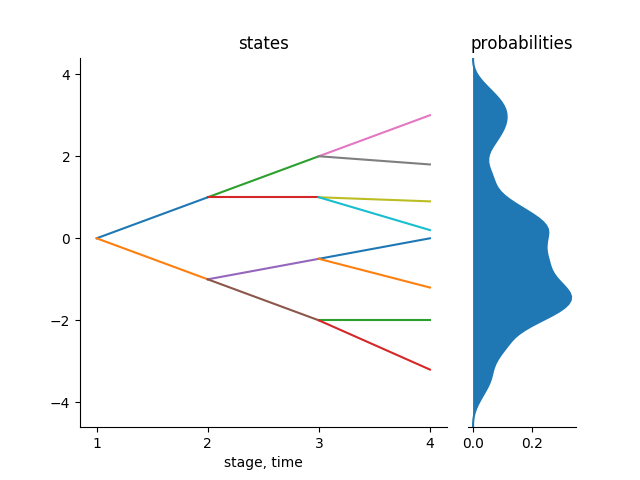 |
|---|---|
| Predefined tree of state 1 | Predefined tree of state 2 |